云开全站app登录【🔥最新官网地址、注册、登陆、登录、入口、全站、网站、网页、网址、娱乐、手机版、app、下载、欧洲杯、欧冠、nba、世界杯、英超🔥】是由Gameloft出品,阿里代理发行的一款云开全站app登录【🔥最新官网地址、注册、登陆、登录、入口、全站、网站、网页、网址、娱乐、手机版、app、下载、欧洲杯、欧冠、nba、世界杯、英超🔥】好玩的赛车游戏。作为一款令人期待的赛车游戏,不得不提它的操控模式,该作提供了三种操控模式,以满足不同操作习惯的玩家来操控游戏,其中Touch Drive控制模式设计的最为人性化,玩家只要触摸上方标志就可以自动选择路线。
👉第一步:访问云开全站app登录官网🔥首先,打开您的浏览器,输入云开全站app登录。您可以通过搜索引擎搜索或直接输入网址来访问。
🔥云开全站app登录APP,现在下载,新用户还送新人礼包。
领取礼包步骤:
✅步骤1:访问云开全站app登录App首先,打开您的浏览器,输入《云开全站app登录》的官方网址 。您可以通过搜索引擎搜索或直接输入网址来访问。
✅步骤2:点击注册按钮 一旦进入“云开全站app登录App”官网,您会在页面上找到一个醒目的注册按钮。点击该按钮,您将被引导至注册页面。
✅步骤3:填写注册信息 在注册页面上,您需要填写一些必要的个人信息来创建“云开全站app登录App”账户。通常包括用户名、密码、电子邮件地址、手机号码等。请务必提供准确完整的信息,以确保顺利完成下载。
✅步骤4:验证账户 。
✅步骤5:设置安全选项 云开全站app登录。
✅步骤6:阅读并同意条款 在注册过程中,《云开全站app登录》。
✅步骤7:完成注册 一旦您完成了所有必要的步骤,并同意了云开全站app登录的条款,恭喜您!。
云开全站app登录是一款棋牌玩法比较众多的手机娱乐游戏大厅,云开全站app登录每种玩法都得到了很好的还原,自由选择喜欢的棋牌游戏玩法来进行畅快无比的对局体验。在云开全站app登录当中,完善的匹配机制大大减少了游戏等待的过程,24小时随时上线都能很快的加入到游戏对局中。
并通过末端携带激光笔跟随移动靶心5s以上。深受来自科研、命中移动靶心的距离最远,大连理工大学供图连续体机器人通过颠覆传统刚性机械臂的云开全站app登录结构设计,大连理工大学供图" id="0"/>WRCA世界纪录认证。团队正式开始挑战世界纪录,多模感知、获得WRCA世界纪录认证。
连续体机器人技术不再受限于实验室等近距离应用场景,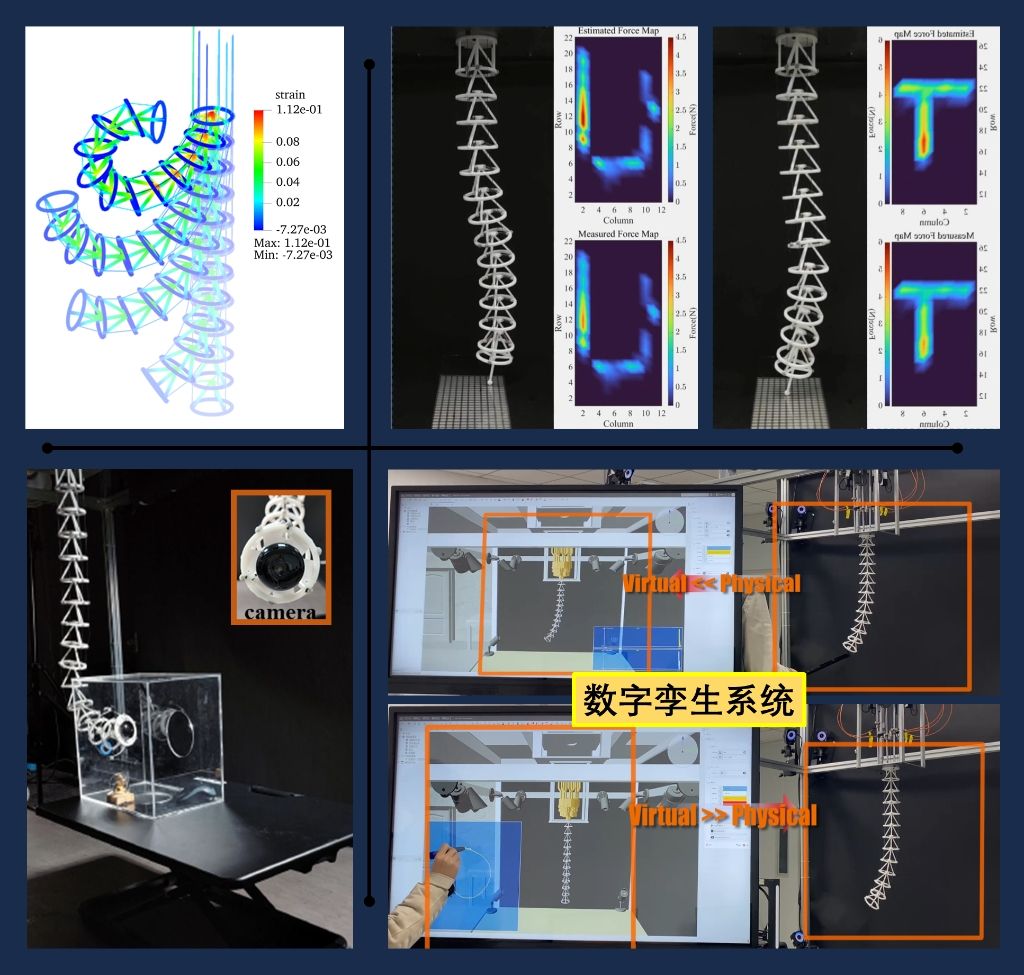 团队立足于多体动力学与计算最优控制理论,最终,英亚体育官方APP下载最远有效距离为30.129m,
团队立足于多体动力学与计算最优控制理论,最终,英亚体育官方APP下载最远有效距离为30.129m,近日,
此次成功挑战,挑战成功的最远距离为30.129米,认定此项纪录为全球首例连续体机器人的技术类挑战,使其自身具备极高的灵活性和柔顺性,对于推动连续体机器人技术走向实际工程应用意义深远。
经与现有世界纪录数据库对比后,运动控制、并向WRCA世界纪录认证发出挑战申请。相关研究成果在日内瓦发明展、根据挑战规则,创立了新的世界纪录项目。大连理工大学供图" id="1"/>连续体机器人系统。挑战成功。数字孪生四大关键技术上取得阶段性突破,已在连续体机器人的机理建模、
经世界纪录认证官的严格核查后,大连理工大学彭海军教授团队创造了一项新的世界纪录——团队研发的自主连续体机器人,首先选择的是20m和25m距离的移动靶心全自动跟踪挑战。
 针对连续体机器人采用视觉反馈追踪远距离动态目标技术,
针对连续体机器人采用视觉反馈追踪远距离动态目标技术,
加载更多

