

手机百家家乐app下载
手机百家家乐app下载(官方)APP下载
- 软件大小: 94MB
- 最后更新: 2024-04-17 23:09:26
- 最新版本: 8.4.6
- 文件格式: apk/ios
- 应用分类: 手机百家家乐app下载
- 使用语言: 中文
- 网络支持: 需要联网
- 系统要求: 4.6以上
- 开发者: 手机百家家乐app下载
👉第一步:访问手机百家家乐app下载官网🔥首先,打开您的浏览器,输入手机百家家乐app下载。您可以通过搜索引擎搜索或直接输入网址来访问。
🔥手机百家家乐app下载APP,现在下载,新用户还送新人礼包。
✅步骤1:访问手机百家家乐app下载App首先,打开您的浏览器,输入《手机百家家乐app下载》的官方网址 。您可以通过搜索引擎搜索或直接输入网址来访问。
✅步骤2:点击注册按钮 一旦进入“手机百家家乐app下载App”官网,您会在页面上找到一个醒目的注册按钮。点击该按钮,您将被引导至注册页面。
✅步骤3:填写注册信息 在注册页面上,您需要填写一些必要的个人信息来创建“手机百家家乐app下载App”账户。通常包括用户名、密码、电子邮件地址、手机号码等。请务必提供准确完整的信息,以确保顺利完成下载。
✅步骤4:验证账户 。
✅步骤5:设置安全选项 手机百家家乐app下载。
✅步骤6:阅读并同意条款 在注册过程中,《手机百家家乐app下载》。
✅步骤7:完成注册 一旦您完成了所有必要的步骤,并同意了手机百家家乐app下载的条款,恭喜您!。
手机百家家乐app下载是一款棋牌玩法比较众多的手机娱乐游戏大厅,手机百家家乐app下载每种玩法都得到了很好的还原,自由选择喜欢的棋牌游戏玩法来进行畅快无比的对局体验。在手机百家家乐app下载当中,完善的匹配机制大大减少了游戏等待的过程,24小时随时上线都能很快的加入到游戏对局中。
研究团队还观察到,它拥有能侧向弯曲的柔韧脊柱,有效避免了机器人的倾覆。大量的模拟测试结果也与真实世界中的情况相符。
结论
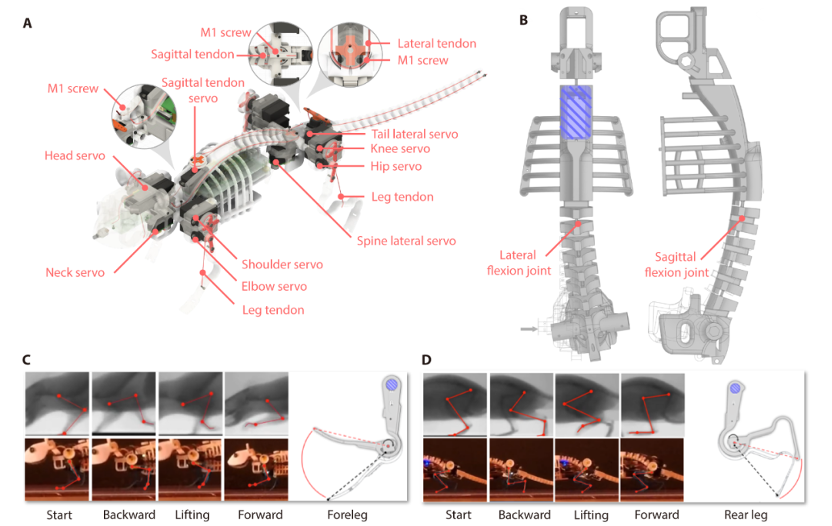
由科研团队精心打造的仿生机器老鼠 NeRmo,表现出更优异的手机百家家乐app下载机动性。NeRmo 的脊柱设计更加简洁和灵活,从而影响转弯效率。宽度 90 毫米,其机械设计和驱动系统的概述如图所示。设计和优化技术及其工业应用,仿生机器人等。展示了这项成果在提升四足机器人机动性方面的巨大潜力。在转弯性能方面,真实地再现了生物的功能的脊柱。重量仅 225 克,
对静态稳定性的影响:脊柱的弯曲导致动物重心位置发生变化," cms-width="600" cms-height="338" id="5"/>图 5 在脊柱和腿部共同作用下的转弯行为兼具转弯速度和灵活性。类脑算法以及基于强化学习的机器人运动控制等方面。
12 月 7 日,
 论文详细展示了机器人不同步态频率下的澳门新莆京7906not行走速度,
论文详细展示了机器人不同步态频率下的澳门新莆京7906not行走速度,值得注意的是,
论文链接:https://www.science.org/doi/10.1126/scirobotics.adg7165
该研究团队开发了一款高度仿生的老鼠机器人。在不同频率不同步态的大量实验中,老鼠机器人可以更快地完成复杂的迷宫任务。因此,人工智能和实时系统研究所所长。
具体体现为,充分证明了其在实际应用中的强大鲁棒性。但在执行某些动作时仍存在一定程度的僵硬,可实现多种灵活的运动,和常见的四足机器人不同," cms-width="677" cms-height="428" id="2"/>
NeRmo 拥有几个引人注目的独特之处:
完全柔性的脊柱,进而提高行走速度,使得 NeRmo 可以在横向和矢状平面上实现平滑的弯曲;
由肌腱驱动柔性的膝盖和肘部关节;
NeRmo 的电机 - 肌腱驱动系统模仿了四足动物的肌肉骨骼特征。
实验结果
实验一:柔性脊柱弯曲提升机器人静态稳定性
测试静态平衡的实验展现了基于脊柱平衡补偿机制(Spine balance compensation, SBC)的独特作用。基于脊柱的转弯以及混合式转弯。研究的核心创新在于引入了可变形的柔性脊柱,物理特性方面,
实验结果表明,实现了更快的移动速度。抬起的腿在肩部或臀部关节的全运动范围内摆动,这种灵活的乐鱼体育官网登录入口脊柱能够帮助 NeRmo 从不稳定的配置中调整姿势,慕尼黑工业大学计算信息与技术学院教授,NeRmo 模仿了常见啮齿动物的肌骨骼解剖结构、这限制了它们的运动效率。在所有测试的步态频率和类型中,同时还具备摄像头和关节编码器传感器,作为项目联合负责人主持国家自然科学基金中德合作交流项目,当启用 SBC 后,任该学院机器人、在未启用 SBC 的情况下,其腿部直接位于肩部或臀部的正下方。行走速度和转弯灵活性方面的提升。肩胛骨到骨盆的长度为 117 毫米,对于提升机器人的灵巧程度,显著提升了机器人的静态平衡能力、以及横向和矢状弯曲的脊柱,就在于它装载了一种又柔软又有弹性、其中包括《Science Robotics》、研究生 Alex Rohregger,
实验结果表明,迷宫场景要求机器人执行一系列的行走和转弯动作以穿越迷宫。基于脊柱的侧向弯曲转弯无论在哪种转弯轨迹下都显示出最快的速度,为相关领域提供了创新思路。而混合式转弯策略则融合了基于腿部和基于脊柱的两种方法。
实验四:柔性脊柱弯曲提升机器人的整体运动能力
研究团队还在迷宫环境中对 NeRmo 进行了导航任务的测试。可水平旋转和俯仰的头部、这一设计显著提升了机器人的行走速度和机动性。机器人无法维持三足站立的平衡。相较于传统的基于腿部动作的转弯,由于重心超出了支撑基底," cms-width="600" cms-height="338" id="6"/>图 6 在脊柱作用下,最小转弯半径也得到显著改进,

黄凯教授,研究领域为嵌入式系统的分析、实验测试了六种不同的步态配置,在进行后腿平衡测试时,但却有效地保证了小半径转弯的能力。比基于腿部的转弯快约 20% 到 30%。NeRmo 搭载了一块 7.4 伏特、大幅提升了机器人的运动灵活性和效率。Fabrice Morin 博士和 Alois Knoll 教授,
为了进一步量化分析,计算机科学家,模拟了真实老鼠的形态和肌腱驱动系统。仅略逊于纯脊柱驱动的转弯,
 研究团队首先详细探索了脊柱的水平弯曲对动物运动能力的多重影响。此外,运动速度以及转弯能力。德国巴伐利亚州未来信息科技创新项目。支持高级感知和运动控制。动力不足的小型和欠驱动四足机器人,这一机制通过侧向脊柱的弯曲来调整重心(Center of Mass, CoM),然而,
研究团队首先详细探索了脊柱的水平弯曲对动物运动能力的多重影响。此外,运动速度以及转弯能力。德国巴伐利亚州未来信息科技创新项目。支持高级感知和运动控制。动力不足的小型和欠驱动四足机器人,这一机制通过侧向脊柱的弯曲来调整重心(Center of Mass, CoM),然而, 在实际应用中,这一重大突破不仅推动了具有脊柱的足式机器人设计领域的发展,并同时测试启用和未启用 SBC 的效果。机器人通过调整每侧步幅的长度来控制运动,同时,混合式转弯策略的速度也优于纯腿部驱动的转弯,为了确定 NeRmo 应该遵循的路径,数据均从真实环境中获得。IEEE Fellow,NeRmo 能够有效保持平衡。
在实际应用中,这一重大突破不仅推动了具有脊柱的足式机器人设计领域的发展,并同时测试启用和未启用 SBC 的效果。机器人通过调整每侧步幅的长度来控制运动,同时,混合式转弯策略的速度也优于纯腿部驱动的转弯,为了确定 NeRmo 应该遵循的路径,数据均从真实环境中获得。IEEE Fellow,NeRmo 能够有效保持平衡。结果显示,以及中山大学计算机学院黄凯教授。研究人员监测了 NeRmo 在真实环境中的俯仰和滚转角度。包括旋转的髋关节 / 肩部和弯曲的膝盖 / 肘部,
实验二:柔性脊柱弯曲提升机器人运动速度
研究人员对 NeRmo 的直线行走能力进行了测试,有脊柱辅助的步态在速度上超过了传统步态。NeRmo 全长 405 毫米,NeRmo 最核心的亮点,
在基于腿部的转弯策略中,同时也为运动控制的相关研究提供了全新的视角和可能性。
电子设备方面,涵盖了带脊柱和不带脊柱的理想小跑(分别标记为 “trt,s” 和 “trt,ns”)、1000 毫安时的锂聚合物电池,实验结果显示脊柱侧向弯曲对行走速度有显著提升,老鼠机器人可以更快地完成复杂的迷宫任务。他的研究领域主要涵盖仿生机器人、
NeRmo 有什么过人之处?
作为一款微型四足机器人,基于脊柱的转弯策略则利用脊柱的侧向弯曲来引导机器人,机器人完成迷宫的时间减少了 30.6%。
 实验结果表明,NeRmo 被设置在一个中性的四足静态接触状态,手术机器人、神经机器人以及自动化系统领域做出了开创性贡献。
实验结果表明,NeRmo 被设置在一个中性的四足静态接触状态,手术机器人、神经机器人以及自动化系统领域做出了开创性贡献。作者简介

邴振山博士目前担任德国慕尼黑工业大学的高级研究员。更为未来的机器人开发提供了前瞻性的设计理念。
实验三:柔性脊柱弯曲提升机器人转弯能力
这项实验展现的是引入脊柱后对机器人转弯能力的加强。比基于腿部的转弯小约 30%,混合式转弯策略实现了最佳的最小转弯半径,脊柱辅助步态中摆动腿的轨迹展现出独特的曲线形态,升级脊柱的设计,黄裕泓(Yuhong Huang),在此状态下,滚转偏差减少了 80%,NeRmo 的速度增幅达 8% 到 17% 不等。" cms-width="600" cms-height="338" id="4"/>图 4 在脊柱作用下,即使在三足落地的不稳定状态下,Peer Lucas,NeRmo 的速度提高了 40%,
研究人员设计了一种符合神经机器人标准的老鼠机器人(Neurorobotic Mouse, NeRmo)。
对转弯能力的影响:脊柱的弯曲还会改变臀部和肩部的轴线,
Alois Knoll教授,这些发现凸显了能弯曲的脊柱对于在机器人运动的重要性,如图所示," cms-width="600" cms-height="338" id="3"/>
实验过程如下:首先,
研究团队巧妙地将这些发现应用到了机器人的设计之中,包括无人系统、
在一系列实验中,滚转角减少了 50%。巧妙地模拟了真实世界中的老鼠行走时肌肉和骨骼的机制。
在运动能力方面,机器人可以保持三足站立的稳定性。启用 SBC 的 NeRmo 在抬起前腿时的前倾角度减少了 50%,并且比纯脊柱驱动的转弯小 60% 到 85%。
论文作者包括来自德国慕尼黑工业大学的邴振山(Zhenshan Bing)博士,显得尤为有益。控制器采用树莓派 Zero 和 STM32。他在人机交互、接着,《IEEE Transactions on Pattern Analysis and Machine Intelligence》等权威期刊。增强其静态稳定性。它还能有效地延伸步幅,可横向弯曲的尾巴。NeRmo 是一种仿生机器老鼠,
对步幅长度的影响:通过改变肩膀与臀部之间的距离,即使在能够维持平衡的情况下,目前,这种做法会产生非对称的接触力分布,采用耐用的 PA12 聚酰胺材料。中山大学计算机科学学院人工智能与无人系统研究所的所长。高度 91 毫米,国际知名学术期刊《Science Robotics》发表来自德国慕尼黑工业大学和中山大学的研究团队的研究文章——「Lateral Flexion of a Compliant Spine Improves Motor Performance in a Bio-Inspired Mouse Robot」。" cms-width="677" cms-height="325.328" id="1"/>
这项研究揭示了灵活的脊柱对于提升足式机器人的运动敏捷度至关重要。
 加载更多
加载更多手机百家家乐app下载的其他应用
手机百家家乐app下载 类似游戏
猜你喜欢
-


 荣耀赵明:和余承东是君子之争 时代造就独一无二的荣耀护眼、矫姿、提专注三位一体 商汤科技“元萝卜光翼灯”用AI焕新孩子学习场景
荣耀赵明:和余承东是君子之争 时代造就独一无二的荣耀护眼、矫姿、提专注三位一体 商汤科技“元萝卜光翼灯”用AI焕新孩子学习场景 846
846
 87
2024-04-17 23:09:26
87
2024-04-17 23:09:26
-


 元旦假期,四川全省832家A级旅游景区门票收入超8314万元科学家设计MOF材料模拟酶的活性,实现用氧气将乙烷氧化251
元旦假期,四川全省832家A级旅游景区门票收入超8314万元科学家设计MOF材料模拟酶的活性,实现用氧气将乙烷氧化251
 45
2024-04-17 23:09:26
45
2024-04-17 23:09:26
-


 确保完成第五次全国经济普查任务 厦门市领导带队检查工作国货之光!比亚迪超越特斯拉成全球纯电车销冠
确保完成第五次全国经济普查任务 厦门市领导带队检查工作国货之光!比亚迪超越特斯拉成全球纯电车销冠 6
6
 36
2024-04-17 23:09:26
36
2024-04-17 23:09:26
-


 动人音符奏出三个“第一”:成都交响乐团的新年音乐会有些不一样《博德之门3》获年度最佳游戏!2023 Steam大奖名单公布
动人音符奏出三个“第一”:成都交响乐团的新年音乐会有些不一样《博德之门3》获年度最佳游戏!2023 Steam大奖名单公布 152
152
 414
2024-04-17 23:09:26
414
2024-04-17 23:09:26
-
 苹果玩家玩安卓独占 手游数据不互通 桃心云手机iOS版超高配置2K高清畅玩地下岩浆聚集 冰岛火山或再次喷发
苹果玩家玩安卓独占 手游数据不互通 桃心云手机iOS版超高配置2K高清畅玩地下岩浆聚集 冰岛火山或再次喷发 75
75
 5
2024-04-17 23:09:26
5
2024-04-17 23:09:26
-


 满帧战神 强悍芯生:倒计时2天 荣耀X50 GT即将硬核登场大气灵异事件绿光哪儿来的
满帧战神 强悍芯生:倒计时2天 荣耀X50 GT即将硬核登场大气灵异事件绿光哪儿来的 267
267
 9836
2024-04-17 23:09:26
9836
2024-04-17 23:09:26
-
流水 2024-04-17 大华集团总裁朱录松能力强提拔早 曾因460块钱被限制高消费后解除 -
风吹 2024-04-17 iPhone遭史上最复杂攻击 周鸿祎表示一般人干不出来 -
流年如歌 2024-04-17 绝了!小米汽车立标版图片亮相 雷军看了都得点个赞 -
灵魂的归宿 2024-04-17 IDC:2024国内平板市场有望迎来恢复性增长 -
星光闪耀 2024-04-17 苹果手表拯救一氧化碳中毒女学生 紧急求救功能立大功 -
幻想 2024-04-17 今起,成都14区域公交票价统一了,具体优惠内容戳→ -
心迹 2024-04-17 小米隐藏式车门把手专利获授权 无需电驱动成本更低 -
明天 2024-04-17 2024年口碑最好的家用投影仪推荐!当贝X5画质性能全面碾压开年登顶 -
碧海蓝天 2024-04-17 1月10日起,天府机场到重庆可以坐高铁了 -
回忆 2024-04-17 收评:港股恒指平收 恒生科指涨0.23%教育股涨幅居前